First watch this video which nicely introduces SLAM a popular modern robot navigation technique in a pretty painless way.
SLAM (Simultaneous Localization And Mapping) is newer technique for robot navigation where the robot both learns where it is and create the map at the same time. Earlier algorithms either used pre-existing maps and then worked to discover where the robot was within the map (Localization), or would know where it was (always start from a fixed point), and then build a map from that point. This approach allows you to do both at the same time. To implement it completely requires to pretty hefty math, but this overview gives a theoretical overview of SLAM.
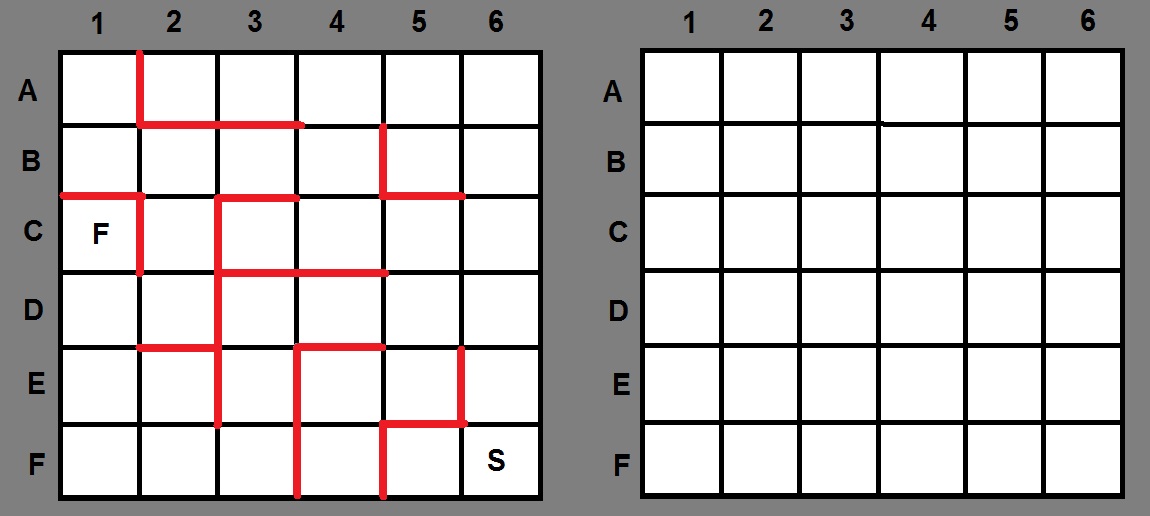
Print or save the maze below:
For both of these problems below, assume that the robot stops once it reaches the goal location, even if there is unexplored parts of the map/world.
Suppose the robot starts at position S and is searching for goal F. show the series of moves, and the part of the map explored using the simple SLAM approach discussed in the video.
Now suppose you start at F and move to S. Again show the moves the robot does and the part of the map explored by the robot.
Does the amount of the world that the robots maps change depending on which point is the start and which is the goal?
Briefly (the whole writeup including the images should be about 2 double spaced pages) evaluate this technique compared to 1-2 of the navigation techniques we discussed in class.
Maze originally from http://www.llemonade.com/math2.html used here for educational purposes.