AI Project 3: Planning
Due: 11:59pm Wed April 18th 11:59 pm April 30th
Summary:
Robbie the robot needs help! He has been asked to retrieve a lost
bracelet. He can see it, but doesn't know how to plan and there is a
wall between him and the bracelet. You are to write a planner to help
him plan how to get to the bracelet.
What you must do:
You start with a virtual world that I'm giving you. You can see a screen shot below:
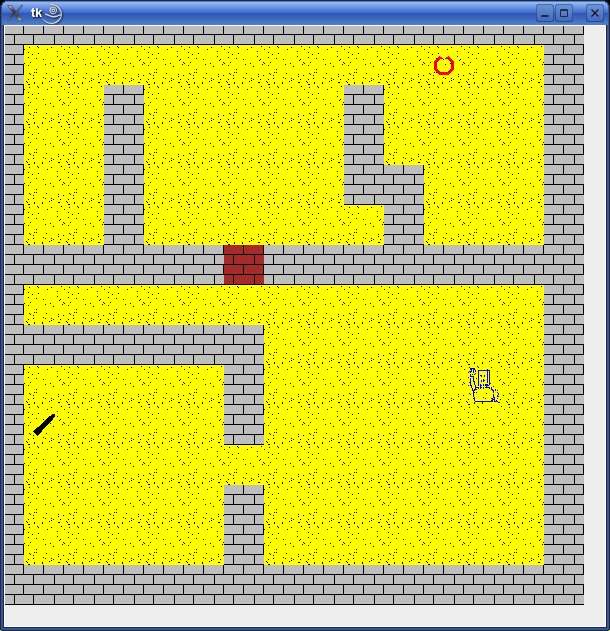
Robbie the robot is in blue. The bracelet is in red near the upper
right hand corner. The grey bricks are walls that Robbie can't go
through. The brown part of the wall is a door that can be opened by
pulling the lever in the room in the lower left.
You need to develop an appropriate representation of the starting
state, the world (including the door, lever and bracelet) and the robot
so that you can use them to automatically plan a series of actions that
will get robbie from the starting state (shown above) to the braclet.
Once your planner has generated a series of actions, carry them out by
using methods from the world.py module.
You can get the world.py module and all of its image data in a zip file
from my home directory on eagle. The file is ~jsantore/planLab.zip
The writeup:
Include the standard header in your writeup:
- Your Name
- How do I run your program.
- Is therere anything left undone in your program.
Then you need to write a report on your planner. This report should
be a page or two long and address at least the following issues.
- What planning algorithm did you use?
- How efficient was your planner? Does it follow alot of false
trails before finding the right one? Did if find the right one at all?
- How intelligent is your planner? What aspects of intelligence did it show? What more does it need?
- How would you make a planner more intelligent given more time and more resources.
As usual submit all files in a zip file by email by the due date.