Due: Thursday February 23rd with in class demo and project
report. (Note that BSC observes a Monday schedule of classes on Feb21st so we
will not meet the Tuesday before the lab is due.)
Overview: This is the traditional line following
lab with a couple of twists. You will design and program a robot to
search through a maze (essentially a line following lab). Use any
method you like to program the robot.
This is your first project and your objective is to integrate sensor input and motor output to perform a simple line following task. Your robot will need to continuously monitor sensors and act accordingly in real time with no external input from you.
Your materials are in a green Lego bin in the cabinet in the back of the lab. The drawers of the cabinet and the bin themselves have been labeled according to groups. Use only the materials assigned to your own group.
You will have an augmented Lego educational set
including two touch sensors, two light sensors, the RCX and two
motors. Each bin has been supplemented with additional Legos to give
you more choice when building your robots. You may find that you have
a great idea but just need a couple more legos to make it real. I
have a few spare Legos from other kits that I can give out on a
first proposal that shows the needs gets the legos basis. (don't come
just asking for lots of extra parts, rather, come with a nearly
finished robot and tell me what you need to finish it.
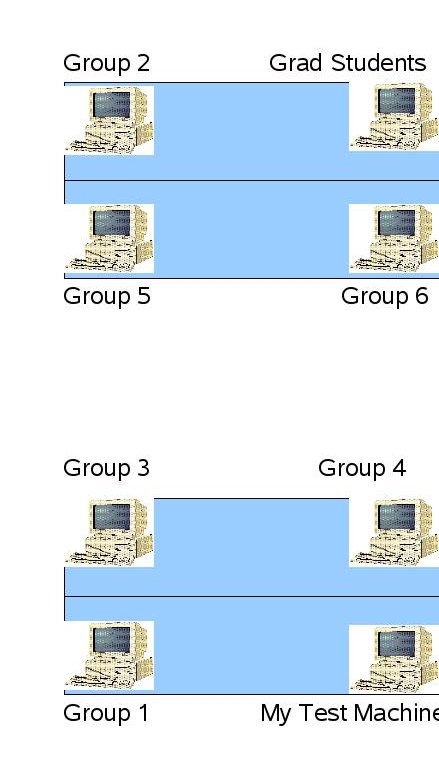
Each group is hereby assigned a
particular lab space according to the diagram below.
Use only the computer assigned to your group. In
most cases (unless I needed to check something during the semester)
your group only has login privileges on your own computer. These
computers are not on the standard bsc network. All of your work is
saved locally on your own computer. You are encouraged to save your
work on a USB drive or other external storage.
These computers are setup with two drives. Drive one contains SUSE linux and is the one that we will be using for this lab.
For those of you who have card access setup (it should be all of you by now), you have access of the lab whenever Moakley is open and theother two classes aren't meeting. (Monday -Wednesday 1:50-3:05 and Tues-Thurs 2-3:15)
Your group will build a Lego RCX based robot that will
navigate a maze. Your maze will consist of a colored line on a
contrasting background. A sample maze will be provided in the lab to
practice on. You should design your robot to navigate the maze as
quickly as possible without skipping any of the maze or getting lost
and running off of the maze.
On February 23rd each of the 6
groups will demo their robot in class on a new maze that I will bring
in at that time. Dead reckoning will not be an acceptable method of
solving this task. You will need to use the Lego sensors (Lego light
sensors) to navigate the maze.
For this lab we will be using the lejos environment. I
will give a brief lecture preparing you on the day the lab is
assigned. You will get a brief lecture on Java for c++ programmers
and the API provided by the lejos system.
Before you can run
your own programs, you must download the firmware (in this case a
Java virtual machine for the RCX brink). To do this run the
command:
lejosfirmdl
you can optionally use the -f flag
to try to download it in fast mode. Please note that the lights in
the room often interfere with the download. If you get error messages
about failure to download - or other strange messages, then you are
probably getting interference from the lights. If your group is the
only one in the lab, turn them off (there is one that stays on all
the time) and try again. Otherwise take your green bin and turn it
over the transmitter and the robot to minimize the interference.
Two well defined error messages are:
Tower not responding: Either you didn't plug in the tower, it has no power from the battery, or you plugged in the tower to a non-standard port.
No response from RCX: You forgot to turn on your robot!!!
When you need to compile your Java programs use lejosc
to compile.
lejosc -source 1.2 <filename>
when
you are ready to download your program into the robot, turn on your
robot and run
lejos <class with main function>
Where
<class with main function> is simply the name of the Java class
that contains the main function.
Lejos can be found in
/opt/lejos_2_1_0/ on the lab machines.
Feel free to take a look as some of the example
programs found in the examples directory.
You are not guaranteed a particular color for the line or the background in the final demo, you are only guaranteed that there will be a contrast as significant as that in the test maze. You should write your program so that you are calibrating the sensors before beginning the maze. Your group will be given a couple minutes to calibrate your robot's sensors before beginning the demo.
The Lego robots run on 6 AA batteries. The school has
purchased high capacity rechargeable batteries for use in this class.
Make sure not to lose them. Six of these batteries and one
rechargeable 9-volt battery has been placed in each kit. The 9-volt
battery is needed by the IR transmitter. Please take the batteries
out of the robot if your group is not going to be using the robot for
more than about 36 hours. (if you leave Saturday afternoon and plan
to return Monday morning then fine, you can leave them in, but if you
are leaving for the weekend take the batteries out. Remember that you
are responsible for replacing any parts that your team might damage.)
When your batteries run out of charge, you will need to
recharge them. The 9-volt batteries take about 30 minutes to charge
and use the 9-volt charger on the file cabinet in the lab. It used
the adapter labeled "AC/DC adapter." Plug the adapter into
the outlet, then plug the adapter into the charger. This charger can
handle any number of batteries at once from 1 to its maximum
capacity. The indicator light will turn green when the battery is
charged. Return the charger to the top of the cabinet when
done.
When charging the AA batteries, use the two Energizer
rapid chargers on top of the cabinet (along with the two adapters
labeled "Energizer.") Batteries must be charged in groups
of two in these chargers. The batteries take about 15 minutes to
charge.
Remember that this lab is shared with other classes, so when you leave the lab for the day, you must return all of your materials to the cabinet. Make sure that the sample maze is back near the cabinet (but still visible to other groups who might come in later.) Make sure that the battery chargers are on top of the cabinet in the back, and that your robot and parts kit is in your designated drawer. You are responsible if your group leaves your robot out on the table and it gets broken.
Have fun and I look forward to seeing your finished projects in class later in the Month.