Due: In class demo during class Nov 15th with papers due the week in class.
You're group will program a robot which will traverse a maze to find a light using potential fields for motion planning.
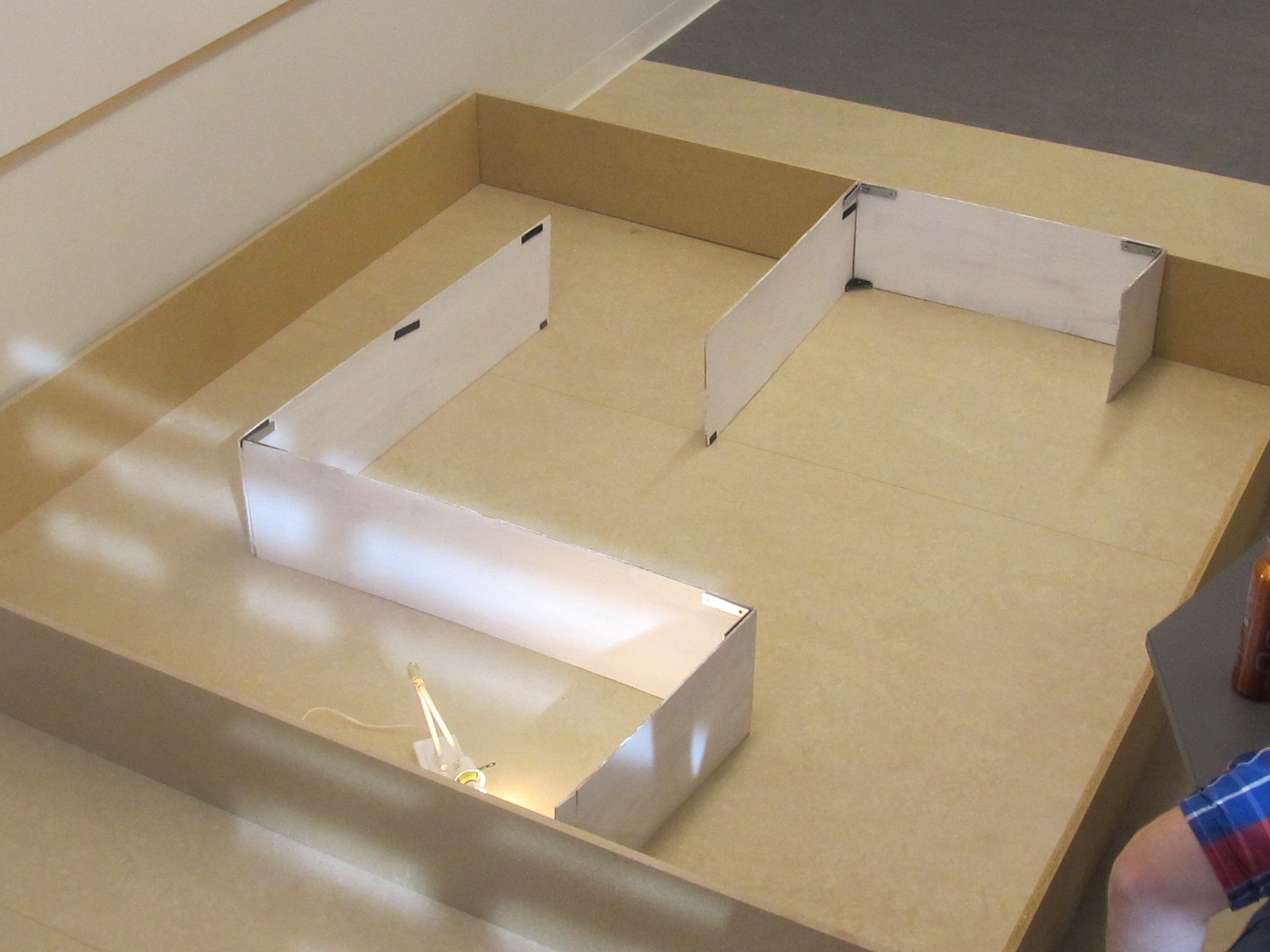
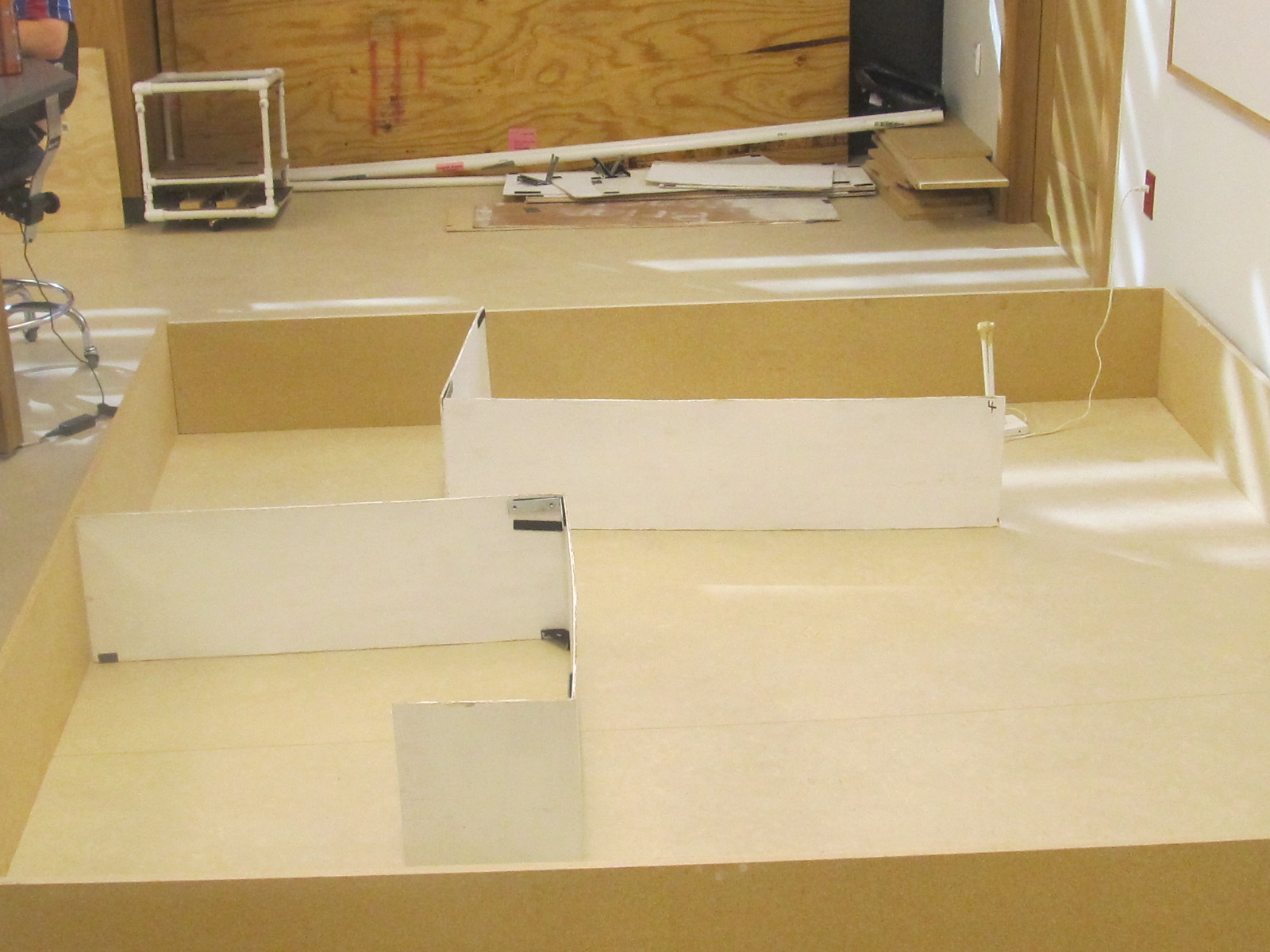
You will use the GoPiGo robot to find a light in a maze such as the one
below. You are to create a robot that can find a light in an arbitrary
maze with obstacles (made of the same maze materials) in it. Your robot
will be dropped somewhere in the maze (chosen by the instructor on demo
day) and will have to find the light. When the robot finds the light, it
should stop no more than 12-13 cm (about 5 inches) from the light and play
a tune for about 4 seconds. You can use the grove buzzer to do this. If
you are using all of your sensor/motor ports, you could alternately flash
the LEDs in a longish and easily identifiable pattern Once you start the
robot in its corner, you cannot touch it again until it either runs out of
time or claims to have found the light and stopped. Your robot has
five minutes to perform this task. You will be penalized for
your robot (or any student) moving any part of the environment. (the
walls of the maze cannot be easily moved, but the light is is more
movable, and more dangerous for the robot)
In the past students have found incandescent lights work much
better than other types. They are fragile though. We'll try
incandescent lights and/or LEDs to see which work better.
Don't forget the charge on your robot. If you ever start to see weird behavior running the same program that used to work, try fresh batteries.
All of the issues that discussed in class apply including
sometimes the same power level produces different speeds in different motors
sometimes the same stimulus will produce different output from two different sensors.
The project report is a report of what you tried to do, what you did, what you learned and what you accomplished. To make my correcting easier, let me give you guidelines on what I'd like to see in it. Make sure you use section headings to make each section easy to find.
Introduction
this is where you explain the problem you were trying to solve and why it is relevant
Robot design
Here tell me what sort of robot you designed (in hardware). Tell me what worked and what did not work. Discuss what you learned based on what worked and what did not.
Software design
Here discuss what sort of control program you built. Again tell me what worked and what did not. Discuss what you learned about robot control software from your experience. Discuss your approach and its relevance to both the current task at hand and the general problem of robots acting in the world.
Include a diagram of your behaviors and their interactions.
Evaluate your robot
Evaluate your robots suitability for the task and the environment include your robot's actual performance in the demo. How well would your robot perform in other environments?
Concluding discussion
Summarize what you learned. Consider the following target audience: next year's robotics students. In this section, summarize from the preceding sections all of the worthwhile dos and don'ts that you discovered in doing this lab. It is not really relevant that your robot did really great unless you tell the reader why. Think about what you would have liked to know when you first saw this lab, and if you have any insights after doing the lab, share them here.